Синхронный и асинхронный двигатель: отличия, принцип работы, применение
Содержание:
- Обмотки ротора
- Основные отличия
- 7.1. Принцип действия асинхронного двигателя
- Ротор асинхронного двигателя
- Устройство синхронного двигателя
- История
- Принцип действия и устройство электромашин разных типов
- Какой лучше
- Преимущества асинхронных двигателей
- Принципы работы
- 6.2.Однофазные асинхронные двигатели
- Трехфазный асинхронный двигатель с фазным ротором
- Восстановление маркировки обмоток
Обмотки ротора
Вращающаяся часть асинхронного двигателя — ротор, так же как и статор, имеет обмотку. Она помещена в пазах 1 стального цилиндра (рис. 9), набранного, как и сердечник статора, из листов электротехнической стали (рис. 10) толщиной 0,5 мм. После штамповки листы собирают в пакет, плотно сжимают, насаживают на вал двигателя и закрепляют. В пазах ротора помещается или короткозамкнутая, или фазная обмотка. Изоляцией между листами ротора обычно
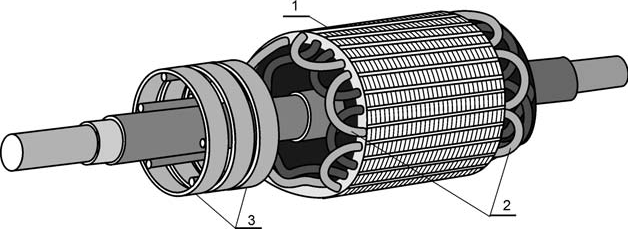
Рис. 9. Фазный ротор асинхронного двигателя: 1 — сердечник ротора; 2 — обмотка ротора; 3 — контактное кольцо
Рис. 10. Стальной лист ротора
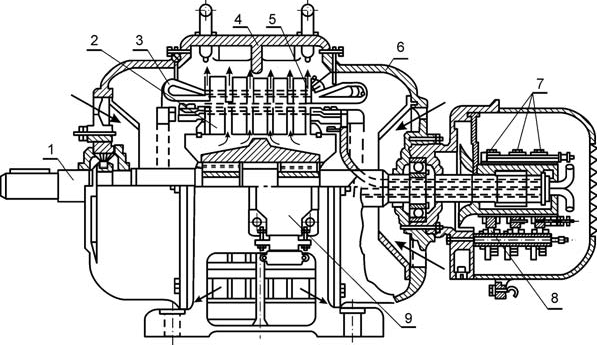
Рис. 11. Продольный разрез асинхронного двигателя с фазным ротором: 1 — вал; 2 — активная сталь ротора; 3 — обмотка статора; 4 — станина; 5 — активная сталь статора; 6 — подшипниковый щит; 7 — контактные кольца; 8 — щетки; 9 — коробка выводов
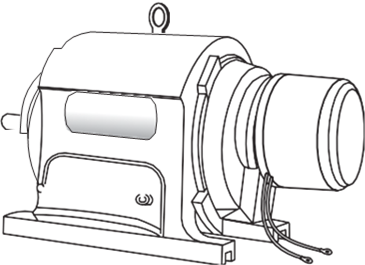
Рис. 12. Трехфазный асинхронный двигатель с фазным ротором
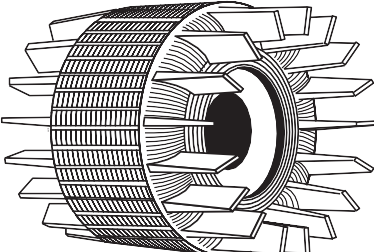
Рис. 13. Короткозамкнутый ротор двигателя с алюминиевой литой обмоткой
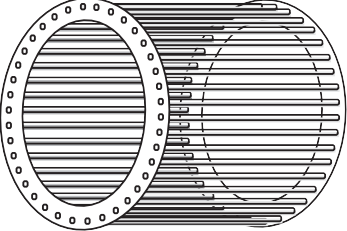
Рис. 14. Беличье колесо
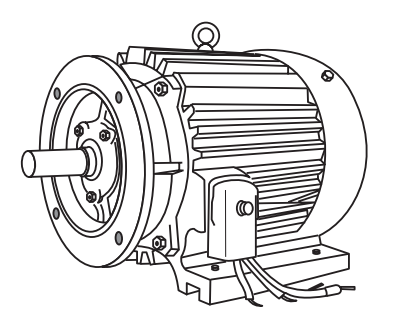
Рис. 15. Трехфазный асинхронный короткозамкнутый двигатель

Рис. 16. Роторы короткозамкнутые: а — с обычной клеткой; б — с двойной клеткой; в — с глубокой клеткой
служит пленка окисла. Активная сталь ротора является частью магнитной цепи двигателя. Обмотка может быть фазной, построенной по тому же принципу, что и обмотка статора. Делается это в том случае, когда в фазы обмотки включается добавочное сопротивление (реостат), необходимый при пуске или регулирования скорости двигателя. Фазный ротор показан на (рис. 9). Обмотка ротора 2 соединяется в звезду, а выводы подключаются к трем контактным кольцам 3, насаженным на вал ротора и изолированным от вала и друг от друга. Контактные кольца изготавливаются из меди, бронзы, редко из стали.
Продольный разрез двигателя с фазным ротором показан на рис. 11.
Чаще изготовляются двигатели с короткозамкнутой обмоткой ротора. Если в пазы ротора уложены голые медные или алюминиевые стержни, концы которых замкнуты накоротко кольцами, то такая обмотка называется короткозамкнутой. Обмотка образует клетку, называемую беличьей; показана отдельно на рис. 14. Короткозамкнутую обмотку ротора делают в трех модификациях: с нормальной клеткой, с двойной клеткой и с глубоким пазом (рис. 16). Для двигателей до 100 кВт чаще всего клетку получают путем отливки из алюминия, при этом одновременно отливаются торцевые кольца и лопасти вентилятора для охлаждения двигателя (рис. 13). Роторные обмотки также выполняют из меди и ее сплавов. В пазы прямоугольной или трапецеидальной формы забивают стержни, к стержням с обеих сторон припаивают твердым припоем замыкающие кольца.
Вид двигателя с фазным ротором и с короткозамкнутым, имеющим внешний обдув для охлаждения, показан на рис. 12 и 15.
Основные отличия
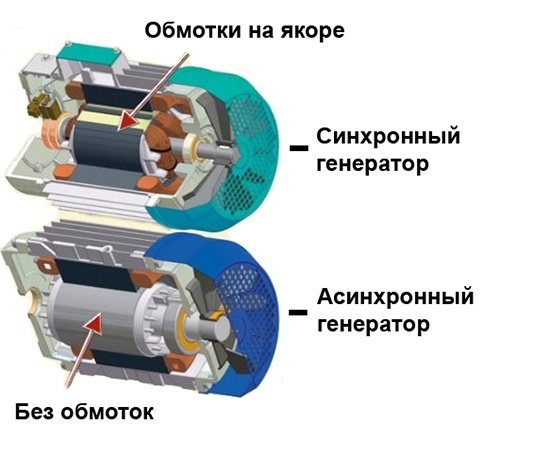
Наличие обмоток на якоре является одним из основных отличий между двумя типами двигателей
Несмотря на внешнее сходство, асинхронные двигатели и устройства синхронного типа имеют несколько принципиальных отличий:
- ротор асинхронных моторов не нуждается в токовом питании, а индукция полюсов зависит от магнитного поля статора;
- ротор в синхронном двигателе обладает обмоткой возбуждения в условиях независимого питания;
- обороты в асинхронном моторе под нагрузкой отстают по величине скольжения от вращений магнитного поля внутри статора;
- обороты в синхронных двигателях соответствуют частоте «оборотов» магнитного поля в статоре и постоянны в условиях разных нагрузок.
Статоры в двигателях асинхронного и синхронного типа характеризуются одинаковым устройством и создают вращающееся магнитное поле.
Синхронные двигатели способны работать с одновременным совмещением функций мотора и генератора.
7.1. Принцип действия асинхронного двигателя
Двигатели переменного тока делятся на синхронные и асинхронные двигатели. Асинхронные двигатели (АД) в свою очередь делятся на двух и трехфазные, из которых в качестве исполнительных двигателей в системах автоматического управления в основном применяются маломощные двигатели до 300 Вт.
Их преимущества перед ДПТ: малая инерционность, бесконтактность, дешевизна.
Их недостатки в сравнении с ДПТ: большие тепловые потери, малый пусковой момент, нелинейные характеристики.
Принцип действия рассмотрим на примере двухфазного асинхронного двигателя, с полым ротором в виде алюминиевого стакана. На статоре этого двигателя расположены две обмотки. Эти обмотки расположены на магнитопроводе под углом 90 друг к другу. На эти обмотки подаются синусоидальные напряжения, сдвинутые по фазе на 90 друг к другу. Под действием этих напряжений в обмотках протекают токи I1, I2, также синусоидальные и сдвинутые по фазе на 90. Будем считать, что амплитуды их равны. Эти токи, в свою очередь, создают в магнитопроводе два пульсирующих вектора магнитной индукции и, соответственно два магнитных потока, равных по амплитуде и сдвинутые по фазе на 90 друг к другу в пространстве и времени. Они суммируются, и создается результирующий магнитный поток, имеющий постоянную амплитуду и вращающийся по окружности с частотой w, где w=2p¦, а ¦ — частота сети.
Рассмотрим получение кругового вращающегося магнитного поля в случае двухфазной системы (рис. 70).
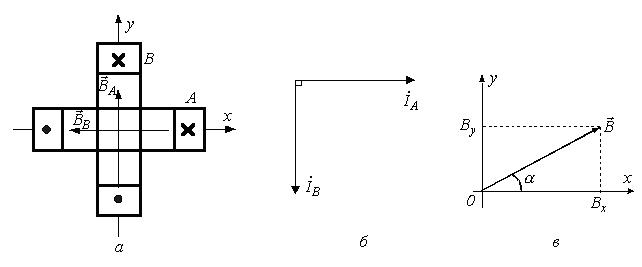
Рис. 70. Двухфазная система
При пропускании через катушки гармонических токов каждая из них в соответствии с вышесказанным будет создавать пульсирующее магнитное поле. Векторы ВА и ВВ, характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону. Если ток в катушке В отстает от тока в катушке А на 90, то ВА= Вmsin(wt) и ВВ= Вmsin(wt-90).
Найдем проекции результирующего вектора магнитной индукции Вна оси x и y декартовой системы координат, связанной с осями катушек:

Модуль результирующего вектора магнитной индукции в соответствии с рис. 70 равен,
при этом для тангенса угла a , образованного этим вектором с осью абсцисс, можно записать
, откуда a=wt.
Полученные соотношения показывают, что вектор результирующего магнитного поля неизменен по модулю и вращается в пространстве с постоянной угловой частотой , описывая окружность, что соответствует круговому вращающемуся полю.
Симметричная трехфазная система катушек также позволяет получить круговое вращающееся магнитное поле. Рис. 71. Каждая из катушек А, В и С при пропускании по ним гармонических токов создает пульсирующее магнитное поле. Катушки питаются трехфазной системой токов с временным сдвигом по фазе на 120. Поэтому для мгновенных значений индукций катушек имеют место соотношения
; ; .
Произведя аналогичные расчеты, получим, что модуль результирующего вектора магнитной индукции равен В=1,5 Вm, и также вращается в пространстве с постоянной угловой частотой ,
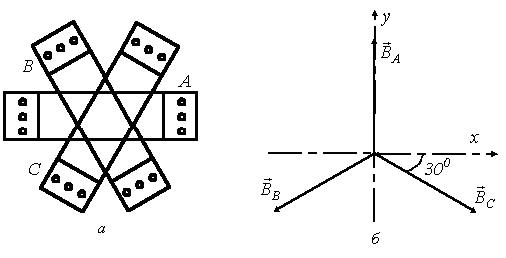
Рис. 71. Трехфазная система
Силовые линии вращающегося магнитного поля пересекают ротор двигателя, выполненный, например, в виде алюминиевого стакана. В материале ротора наводятся вихревые токи, которые взаимодействуют с вращающимся магнитным потоком статоре и создают движущий момент. Под действием этого момента ротор начинает раскручиваться и набирает скорость до тех пор, пока движущий момент не будет уравновешен моментом, создаваемым нагрузкой.
Скорость вращения ротора асинхронного двигателя всегда меньше скорости вращения поля, так как в случае их равенства результирующий магнитный поток будет неподвижен относительно ротора, вихревых токов не будет, и, следовательно, не будет движущего момента. Поэтому двигатель называется асинхронным. Величина отставания скорости вращения ротора от скорости вращения поля характеризуется скольжением.
При заторможенном роторе S=1, в идеальном случае при вращении со скоростью поля S=0.
Используются различные конструкции ротора АД. Есть трехфазные АД с фазным ротором, при этом на роторе также намотаны три, пространственно сдвинутых обмотки. В эти обмотки обычно включают внешние сопротивления (реостаты), которыми ограничивается пусковой ток и может регулироваться скорость вращения ротора. Двухфазные АД изготавливают с короткозамкнутой обмоткой: в виде беличьего колеса; в виде вала или стакана из проводящего материала. .Рис 72, 73, 74.
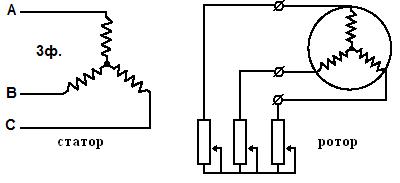
Рис. 72. Трехфазный АД с фазным ротором
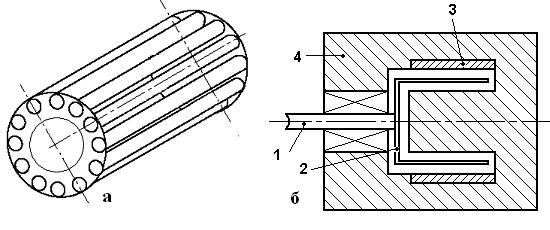
Рис. 73. Ротор АД в виде беличьей клетки (а) и в виде стакана (б)
Ротор асинхронного двигателя
Давайте более подробно рассмотрим, из чего же состоит ротор асинхронного двигателя.
Самая главная часть – это вал. Иначе, как бы происходило вращение?

На вал ротора с двух сторон надеваются подшипники, которые крепятся к передней и задней крышкам и центруют ротор ровно посередине статора.

Далее идет сердечник, набранный из листов специальной электротехнической стали, которые изолированы друг от друга. Кстати, сетевые трансформаторы собираются из такой же стали.
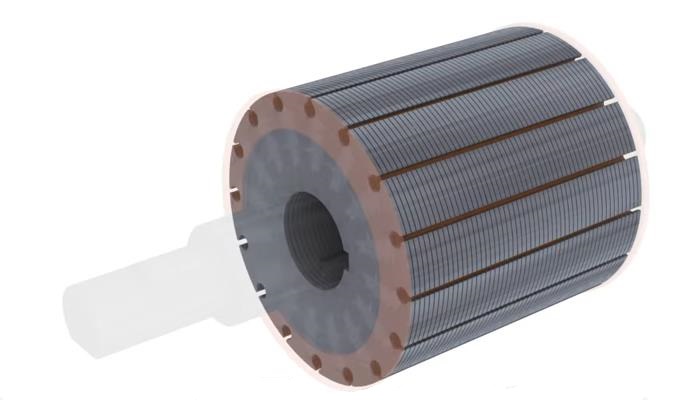

Как вы можете далее заметить, в сердечнике ротора есть специальные пазы
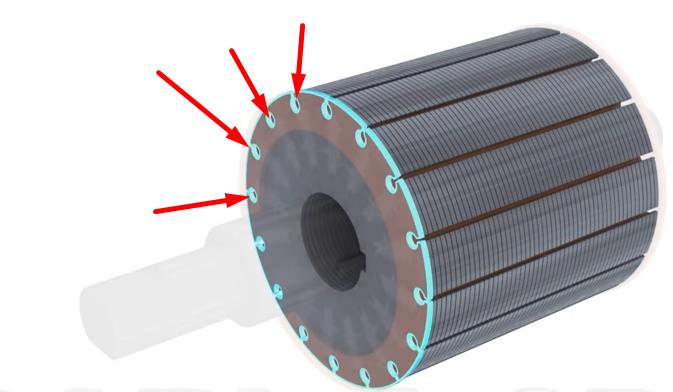
В них вставляются медные или алюминиевые стержни,
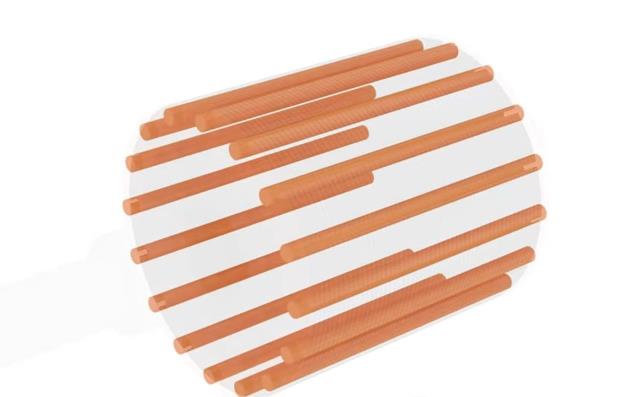
которые замыкаются на кольцо с обеих сторон, образуя так называемую “беличью клетку”.

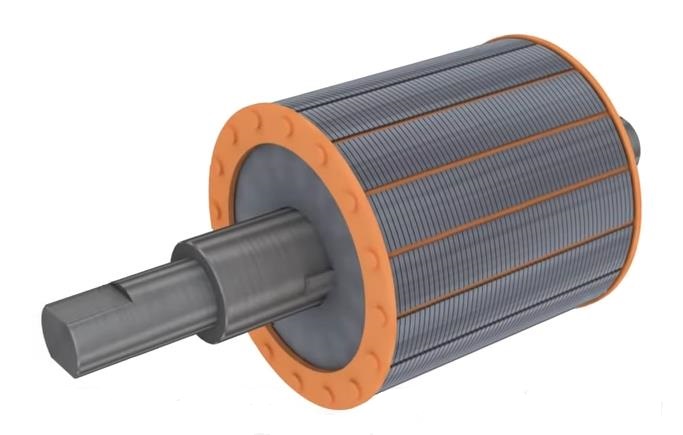
В общем виде полностью собранный ротор асинхронного двигателя выглядит вот так.
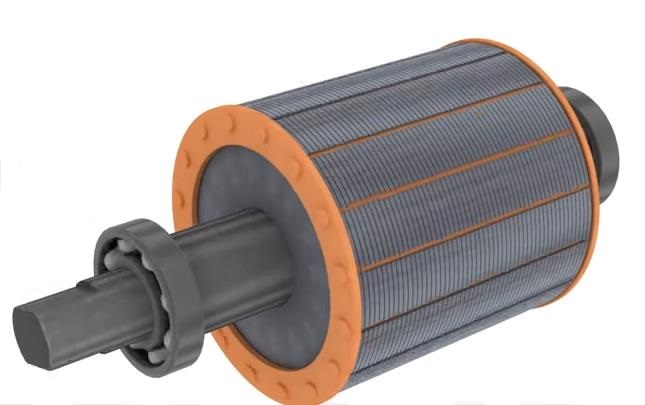
А вот так он выглядит в реальном двигателе.

Всегда помните, что в асинхронном двигателе вращается ротор, а не статор. Статор – это неподвижная часть, а ротор – подвижная часть электродвигателя. В рабочем состоянии двигателя между ротором и статором всегда имеется воздушный зазор. При работе двигателя ротор ни в коем случае не должен задевать статор двигателя.

Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
История
Модель индукционного (двухфазного) двигателя Н. Теслы. Музей Николы Теслы, Белград.
Первый трёхфазный асинхронный двигатель, изобретённый Доливо-Добровольским. Немецкий музей (Мюнхен).
Трёхфазный асинхронный двигатель Н. Теслы. Музей Николы Теслы, Белград.
В 1888 году Галилео Феррарис опубликовал свои исследования в статье для Королевской академии наук в Турине (в том же году Тесла получил патент США), в которой изложил теоретические основы асинхронного двигателя
Заслуга Феррариса в том, что, сделав ошибочный вывод о небольшом КПД асинхронного двигателя и о нецелесообразности применения систем переменного тока, он привлек внимание многих инженеров к проблеме совершенствования асинхронных машин. Статья Галилео Феррариса, опубликованная в журнале «Атти ди Турино», была перепечатана английским журналом и в июле 1888 года попала на глаза выпускнику Дармштадтского высшего технического училища, выходцу из Российской Империи Михаилу Осиповичу Доливо-Добровольскому
Уже в 1889 году Доливо-Добровольский получил патент на трехфазный асинхронный двигатель с короткозамкнутым ротором типа «беличье колесо» (германский патент № 51083 от 8 марта 1889 года под названием «Anker für Wechselstrommotoren»), а в 1890-м — патенты в Англии № 20425 и Германии № 75361 на фазный ротор с кольцами и пусковыми устройствами. Данные изобретения открыли эру массового промышленного применения электрических машин. В 1903 году в Новороссийске построен элеватор с первой в мире промышленной сетью переменного трехфазного тока, все установки которой изготовлены под руководством Доливо-Добровольского. На данном элеваторе, также впервые в мире, применены трехфазные трансформаторы и асинхронные двигатели с фазным ротором. В настоящее время асинхронный двигатель Доливо-Добровольского является самым распространенным электродвигателем.
Принцип действия и устройство электромашин разных типов
Асинхронные и синхронные электродвигатели похожи по конструкции, но есть и отличия.
Устройство и принцип действия асинхронных электродвигателей
Это самые распространённые машины переменного тока. Такие электродвигатели состоят из трёх основных частей:
- Корпус с подшипниковыми щитами и лапами или фланцем.
- В корпусе находятся магнитопровод из железных пластин с обмотками. Этот магнитопровод носит название статор.
- Вал с подшипниками и магнитпроводом. Эта конструкция называется ротор . В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка». В машинах с фазным ротором вместо стержней намотаны обмотки.
В пазах статора со сдвигом 120° намотаны три обмотки. При подключении к трёхфазной сети в статоре наводится вращающееся магнитное поле. Скорость вращения называется «синхронная скорость».
Справка! В однофазных электродвигателях вращающееся поле создаётся дополнительной обмоткой или конструктивными особенностями статора.
Это поле наводит ЭДС в роторе, возникающий при этом ток создаёт своё поле, взаимодействующее с полем статора и приводящее его в движение. Скорость вращения ротора меньше синхронной скорости. Эта разница называется скольжение.
Рассчитывается скольжение по формуле S=(n1-n2)/n1*100%, где: · n1 — синхронная скорость; · n2 — скорость вращения ротора.
Номинальная величи
на скольжения в обычных электромоторах 1-8%. При увеличении нагрузки на валу двигателя скольжение и вращающий момент растут до критической величины, при достижении которой двигатель останавливается.
В электродвигателях с фазным ротором вместо беличьей клетки в пазах ротора намотаны три обмотки. Через токосъёмные кольца и щётки они подключаются к добавочным сопротивлениям. Эти сопротивления ограничивают ток и магнитное поле в роторе. Это увеличивает скольжение и уменьшает скорость двигателя.
Такие аппараты используются при тяжёлом пуске и в устройствах с регулировкой скорости, например, в мостовых кранах.
Принцип действия синхронных электродвигателей
Эти двигатели устроены сложнее и дороже асинхронных машин. Их достоинство в постоянной скорости вращения, не меняющейся при нагрузке. Статор синхронной машины не отличается от асинхронной. Отличие в роторе. В отличие от асинхронного двигателя, вращение осуществляется за счёт взаимодействия вращающегося магнитного поля статора и постоянного поля ротора. Для его создания в роторе находятся электромагниты. Напряжение к катушкам подводится при помощи токосъёмных колец и графитных щёток.
Справка! В роторе синхронных машин малой мощности вместо электромагнитов установлены постоянные или просто магнитопровод имеет явновыраженные полюса. Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.
Какой лучше
Итак, в статье были разобраны устройство и принцип действия двух видов электродвигателей. Говорить о том, что какой-то из них лучше, нельзя. Но отметим, что асинхронные модели проще в конструктивном аспекте. Они надежнее в эксплуатации. Если их не перегружать, то срок службы может быть очень длительным. К сожалению, синхронные виды этим похвастаться не могут. Графитовые щетки быстро изнашиваются, им требуется замена. Но если не уследить, и графит сотрется полностью, то металлические держатели щеток начнут истирать токосъемное кольцо. А его выход из строя – это не только полный выход из строя двигателя, это большое количество искр (трение металла о металл) и возможность появления более серьезных неприятностей.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту. Двигатели этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и неподвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой стоимостью. Они доступны (не зря 90% от всех выпускающихся в мире двигателей именно асинхронные).
- Простотой эксплуатации. Для того чтобы использовать их, не обязательно иметь специальные знания и навыки.
- Универсальностью. Их можно установить практически на любое оборудование.
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства. С ним наша жизнь стала более комфортной.
Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
Отличительные черты асинхронных двигателей
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
6.2.Однофазные асинхронные двигатели
Однофазные асинхронные двигатели широко распространены в системах автоматики, вычислительной технике, бытовых электроприборах. Однофазными на практике принято называть двигатели, питающиеся от однофазной сети переменного тока. Как правило, по своему устройству эти двигатели являются двухфазными – на их статоре располагают не одну,
адве сдвинутые в пространстве обмотки (фазы) переменного тока. У одних двигателей при их работе обе обмотки постоянно находятся под напряжением, т. е. двигатели пускаются в ход и работают как двухфазные. У других при пуске находятся под напряжением обе обмотки, а при работе лишь одна. Такие двигатели пускают в ход как двухфазные.
Всхемах автоматики двухфазные двигатели работают чаще всего в несимметричных режимах, т. е. при эллиптических вращающихся полях,
ане при круговых (как в трехфазных машинах). Несимметричные режимы могут быть следствием двух причин:
1)несимметрично выполненной машины;
2)несимметричной двухфазной системы напряжений.
На статор симметричной машины укладывают две одинаковые обмотки, смещенные пространственно на угол θ = 90º эл. При симметричной системе напряжений на обмотку статора подают двухфазное напряжение с временным сдвигом β = 90º. Если выполнены оба условия, машина работает в симметричном режиме, полностью аналогичном работе трехфазной машины при круговом вращающемся магнитном поле. При невыполнении одного из этих условий машина работает в несимметричном режиме, характеризующемся наличием тормозящего момента на валу двигателя. При отсутствии второй фазы на статоре поле в зазоре машины пульсирующее, не создающее пускового вращающего момента.
Пульсирующую МДС обмотки представляют в виде двух вращающихся в разные стороны составляющих:
|
F = F cosωt = Fm e jωt + |
Fm e− jωt = F |
+ F . |
(6.4) |
||
|
m |
2 |
2 |
1 |
2 |
|
Одну составляющую F1, вращающуюся в ту же сторону, что и ротор, называют прямо вращающейся (прямое поле), а вторую составляющую F2 − обратно вращающейся (обратное поле). При отсутствии насыщения магнитопровода можно оперировать соответствующими магнитными потоками. Такое представление полей позволяет применить методы, знакомые по исследованию трехфазных машин.
Применим этот метод к асинхронному двигателю, в пазах которого располагается одна обмотка – фаза, питающаяся от сети переменного тока.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода |
|---|---|
| Соединение звездой (число выводов 3 или 4) | |
| первая фаза | Р1 |
| вторая фаза | Р2 |
| третья фаза | Р3 |
| нулевая точка | |
| Соединение треугольником (число выводов 3) | |
| первый вывод | Р1 |
| второй вывод | Р2 |
| третий вывод | Р3 |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.
Пуск АДФР
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов .
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
ГОСТ 26772-85 Машины электрические вращающиеся. Обозначение выводов и направление вращения.
А.И.Вольдек. Электрические машины. Учебник для студентов высш. техн. заведений. изд. 2-е, перераб. и доп.-Ленинград: Энергия, 1974.
Восстановление маркировки обмоток
Если точнее, маркировка обмоток нужна только для определения направления намотки катушек обмотки. Конец и начало обмотки обозначают только с этой целью. Дело в том, что при включении обмотки в работу в ней начинают возникать вихревые токи, которые движутся по направлению «от начала к концу». Если обмотки включить по принципу «начало с началом, конец с концом», то токи суммируются, обмотки превратятся в один большой резистор и возникнет огромный суммарный ток. Двигатель начнет сильно гудеть и не будет вращаться. Очень быстро начнут нагреваться обмотки, и двигатель сгорит. Причем, вполне возможно, вспыхнет настоящее пламя оранжево-синего цвета с очень вредным и неприятным запахом.
Существует способ определения концов и начал обмоток.
Весь этот процесс очень хорошо показан на видео. Автор этого видео использовал для проверки сетевое напряжения в 220 Вольт, что я крайне не рекомендую делать. Используйте понижающие трансформаторы, либо автотрансформатор.