Устройство и принцип действия синхронного двигателя
Содержание:
Разнообразие модельного ряда
В продаже сегодня можно встретить несколько видов синхронных генераторов, все они прекрасно справляются с теми или иными задачами. Благодаря этому каждый потребитель может выбрать наиболее подходящую модель устройства, которая будет обладать необходимыми эксплуатационными характеристиками. Большим спросом сегодня пользуются следующие виды генераторов:
- Асинхронное устройство двойного типа. В таком генераторе подключена как роторная, так и статорная обмотки. График работы носит асинхронный характер.
- Турбо. Агрегат отличается неявнополюсным строением генератора, изготавливается из турбин разного вида. К основным положительным характеристикам можно отнести высокую скорость оборотов, которая варьируется в пределах 6 тыс. в минуту.
- Синхронный компенсатор. Такой агрегат является поставщиком реактивной мощности, благодаря чему активно используется для повышения качества электроэнергии.
- Гидро. Ротор имеет существенное отличие от всех аналогов, так как присутствуют специальные полюса. Используется для выработки электроэнергии, работает исключительно на малых оборотах.
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
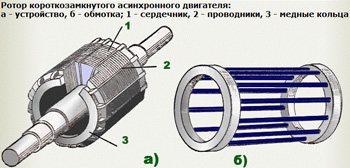
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
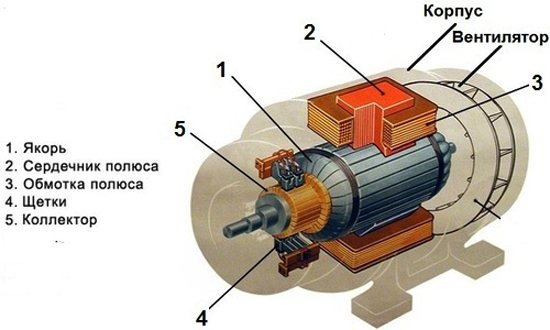
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Режимы работы

Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.

Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
Отличительные черты асинхронных двигателей
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
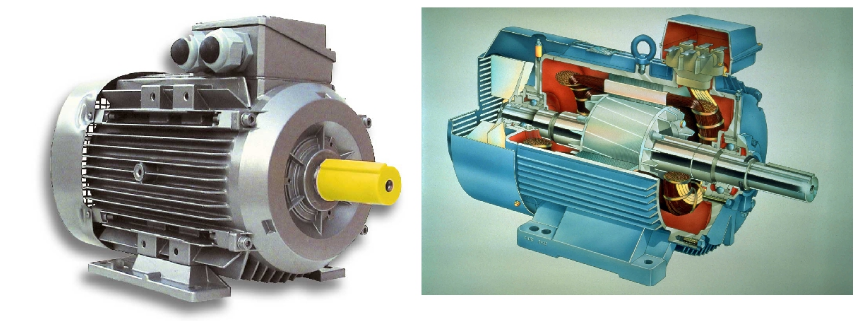
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
https://youtube.com/watch?v=hU9krurbi0c
Объяснение принципа работы синхронного электродвигателя для «чайников»
С детства мы помним, что два магнита, если их приблизить друг к другу, в одном случае притягиваются, а в другом отталкиваются. Происходит это, в зависимости от того, что какими сторонами магнитов мы их соединяем, разноимённые полюса притягиваются, а одноимённые отталкиваются. Это – постоянные магниты, у которых магнитное поле присутствует постоянно. Существуют и переменные магниты.
В школьном учебнике по физике есть рисунок, где изображён электромагнит в виде подковы и рамка с полукольцами на концах, которая расположена между его полюсами.
При расположении рамки в горизонтальном положении в пространстве между полюсами магнитов, из-за того, что магнит притягивает разноимённые полюса и отталкивает одноимённые, на рамку подаётся ток, одинакового знака. Вокруг рамки появляется электромагнитное поле (вот пример переменного магнита!), полюса магнитов притягивают рамку, и она поворачивается в вертикальное положение. При достижении вертикали, на рамку подаётся ток противоположного знака, электромагнитное поле рамки меняет полюсность, и полюса постоянного магнита начинают отталкивать рамку, вращая её до горизонтального положения, после чего цикл вращения повторяется.
В этом заключается принцип работы электродвигателя. Причём, примитивного синхронного электродвигателя!
Ротор синхронного электродвигателя будет вращаться с такой же частотой, с какой меняется ток, подаваемый на клеммы обмотки, т.е. синхронно. Отсюда название этого электродвигателя.
Конструкция и устройство двигателя
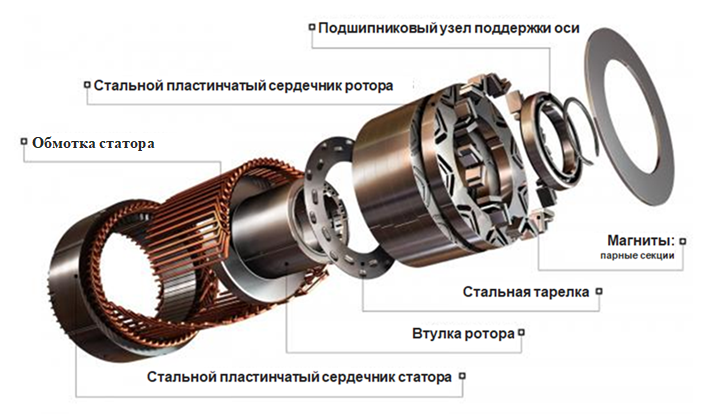
Техническая инфраструктура формируется двумя сегментами – непосредственно механикой и управляющим комплексом. С точки зрения конструкционного устройства агрегат во многом похож на традиционное наполнение электромеханических роторных двигателей. Соответственно, в состав электромотора входят ротор, статор и обмотка. Причем статор представляет собой набор из отдельных изолированных листов, выполненных из стального сплава. В процессе работы они способствуют понижению вихревых токов. В нем как раз и находится обмотка, которая может иметь разное количество фаз. Начинка элемента образована стальным сердечником, а обмотка представляет собой медные волокна. Для защиты применяется корпус, на поверхности которого также предусматриваются средства физического крепления.
Что касается ротора, то он сформирован постоянными магнитами. В зависимости от модификации, он может иметь до шестнадцати пар чередующихся полюсов. Прежде для изготовления роторов применялись ферритовые магниты, что было обусловлено их ценовой доступностью. Сегодня же на первый план выходят эксплуатационные характеристики вентильного двигателя – в частности крутящий момент, который варьируется от 1 до 70 Нм. Пропускная же частота в среднем находится в пределах 2-4 тыс. оборотов. Для достижения таких показателей требуется магнит с высокой степенью индукции, поэтому производители перешли на использование редкоземельных сплавов. Такие магниты не просто дают более высокую производительность, но и обладают меньшими размерами. Отчасти и этот переход способствовал оптимизации габаритов вентильного электродвигателя. Отдельно стоит рассмотреть компоненты управляющего сегмента.
Два вида электродвигателей переменного тока
Асинхронные двигатели — наивная простота
Ротор то догоняет волну, то слегка отстает, потому что синхронно с ней бежать просто не может. Такое явление назвали «скольжением», догнав бегущее магнитное поле, ротор с беличьей клеткой теряет магнитную индукцию и дальше некоторое время просто скользит по инерции. А когда трение или нагрузка вынуждают его отстать от бегущего поля, он опять «почувствует» в себе изменения силовых линий обгоняющего его поля и снова обретет индукцию, а вместе с этим и силы двигаться.
Асинхронные двигатели
То есть, ротор слегка проскальзывает: то догоняет бегущее равномерно по кругу магнитное поле, то «забывает, зачем бежал» и слегка приотстает, то снова «спохватывается» и опять стремится догнать. Постепенно эти отклонения стабилизируются — в зависимости от трения в подшипниках и величины нагрузки на вал — и асинхронный двигатель начинает работать просто со скоростью вращения, чуть меньшей частоты напряжения на статоре. Эта разница частот и называется частотой скольжения.
Двигатели синхронные: сложное в простом
Для того, чтобы ротор был связан с бегущей волной магнитного поля катушек статора жестким образом, придумали электродвигатель синхронный. А проблема решается просто. В роторе вместо изменяющегося магнитного поля от короткозамкнутых токов беличьей клетки нужно использовать постоянные магниты и их магнитное поле.
Устройство двигателя
Вариантов два. Или это поле от постоянного магнита, закрепленного в роторе, или это поле от электромагнитов, установленных в роторе вместо такого магнита.
Обычный магнит, конечно, проще. Но тогда для стандартного функционирования таких электромоторов нужно, чтобы на них на всех — а используются тысячи электромоторов — магниты были строго одинаковы. Иначе параметры движения будут разными, а магниты еще имеют свойство размагничиваться.
Электромагнит, установленный в роторе двигателя, легче заставить вырабатывать поле нужного качества, но требуется электрический ток для его работы. Такой ток, который называется током возбуждения, в свою очередь нужно где-то брать и как-то на ротор подавать.
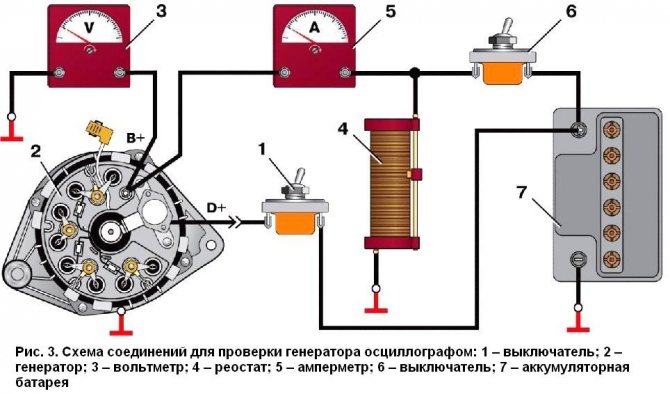
Синхронный электродвигатель (или генератор)
1 – ротор, 2 – коллектор возбуждения
Отсюда и происходит некоторое разнообразие конструкций синхронных двигателей. Но важнее всего то, что синхронные двигатели крутят свой вал строго синхронно частоте бегающего по кругу поля катушек статора, то есть скорость их вращения точно равна — или кратна (если обмоток статора больше трех) — частоте переменного тока в питающей сети.
Однако кроме всего прочего, синхронный двигатель обладает свойством полной обратимости. Потому что синхронный электродвигатель — это тот же самый генератор электрического тока, но работающий «в обратную сторону». В генераторе некоторая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электрическое напряжение от вращающегося магнитного поля ротора. А отличие синхронного двигателя от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с постоянным магнитным полем ротора, толкает его, чтобы ротор тоже вращался.
https://youtube.com/watch?v=SLf6AOt9-Us
Только если в генераторе вращению ротора можно механически придать любую скорость, и от этого будет изменяться частота переменного тока, им генерируемого, то в синхронном двигателе такой роскоши нет. Синхронный двигатель вращается со скоростью изменения напряжения в сети, а оно у нас выдерживается строго в 50 герц.
Принцип действия и устройство синхронного двигателя
Название синхронные относится к электрическим машинам переменного тока, в которых ротор и магнитное поле статора вращаются с одной и той же скоростью, т.е. синхронно.
Как и все электрические машины синхронные машины обратимы и могут работать как в режиме генератора, так и в режиме двигателя. Трехфазные синхронные машины это обычно машины большой мощности.
По устройству статора синхронная машина не отличается от асинхронной. Обмотка статора обычно соединяется звездой. Отличие синхронной машины от асинхронной заключается в различной конструкции ротора.
Ротор синхронной машины представляет собой постоянный магнит. В машинах средней и большой мощности ротор превращается в постоянный магнит с помощью электрического тока, т.е. это электромагнит. Для этого на роторе располагается отдельная обмотка (сосредоточенная), которая называется обмоткой возбуждения, по ней протекает постоянный ток, который называется током возбуждения. Обмотка ротора вращается вместе с ротором, поэтому требуется устройство подвода тока. На роторе располагается 2 медных кольца, к которым подсоединены выводы обмотки ротора, к неподвижной части крепятся графитовые щетки в щеткодержателях, эти щетки скользят по кольцам, обеспечивая контакт.
Источник постоянного тока, служащий для создания тока возбуждения обычно называется возбудителем. В качестве возбудителя используется генератор постоянного тока, генератор переменного тока с выпрямителем, полупроводниковый выпрямитель управляемый или не управляемый.
По конструкции ротора синхронные машины делятся на два типа:
· машины, имеющие ротор с неявно выраженными полюсами, в этом случае ротор имеет вид гладкого цилиндра.
· синхронные машины, имеющие ротор с явно выраженными полюсами. Такой ротор делается в тихоходных машинах с большим числом пар полюсов.
Формула электромагнитного момента такая же как и для асинхронного двигателя:
Синхронный двигатель, как и асинхронный имеет физическое ограничение по моменту. Если к валу ротора приложить тормозной момент, то двигатель его преодолеет, но оси полюсов ротора и статора разойдутся на некоторый угол.
Изобразим условно вращающееся магнитное поле в виде магнита.
При увеличении момента сопротивления увеличивается угол расхождения полюсов ротора и статора.
Обычно угол Θ берут ≤ 30°, поэтому перегрузочная способность синхронного двигателя: больше чем у асинхронного двигателя.
Перегрузочную способность можно изменить воздействуя на ток возбуждения увеличивая ток возбуждения Iв увеличивается магнитный поток Ф. увеличивается ЭДС E и увеличивается максимальный момент Mмакс .
Механическая характеристика синхронного двигателя абсолютно жесткая, при любом моменте сопротивления скорость его вращения одна и та же. Если Mс ≥ Mмакс. двигатель такой момент не преодолеет и остановится.
185.154.22.117 studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам.
Главная | О нас | Обратная связь
Теория работы
Когда на двигатель подается питание переменного тока, полюса статора находятся под напряжением. Это, в свою очередь, притягивает полюса ротора, таким образом, полюса статора и ротора магнитно блокируются. Именно эта блокировка заставляет ротор вращаться с одинаковой синхронной скоростью с полюсами статора. Синхронная скорость вращения задается выражением Ns = 120f / P.
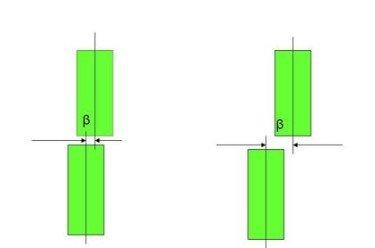
Когда нагрузка на двигатель постепенно увеличивается, ротор, несмотря на то, что он вращается с одинаковой скоростью, имеет тенденцию постепенно снижаться по фазе на некоторый угол, «β», называемый Угол нагрузки или Угол сцепления. Этот угол нагрузки зависит от величины нагрузки, на которую рассчитан двигатель. Другими словами, мы можем интерпретировать, как развиваемый двигателем крутящий момент зависит от угла нагрузки «β».
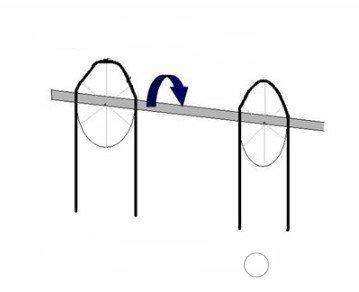
Электрическую работу синхронного двигателя можно сравнить с передачей мощности механическим валом. На рисунке показаны два шкива, «A» и «B». Предполагается, что шкив «A» и шкив «B» установлены на одном валу. «А» передает мощность от привода через вал, в свою очередь заставляя «В» вращаться, передавая мощность нагрузке.
Два шкива, которые прикреплены к одному валу, можно сравнить с блокировкой между полюсами статора и ротора.
Если нагрузка увеличивается, шкив «B» передает увеличение нагрузки на вал, что проявляется в скручивании вала.
Таким образом, поворот вала можно сравнить с ротором, падающим по фазе со статором.
Угол кручения можно сравнить с углом нагрузки «β». Также, когда нагрузка увеличивается, сила скручивания и угол закручивания увеличиваются. Таким образом, угол нагрузки «β» также увеличивается.
Если нагрузка на шкив «B» увеличивается до такой степени, что он заставляет вал крутиться и ломаться, то передача мощности через вал прекращается, когда вал ломается. Это можно сравнить с ротором, выходящим из синхронизма с полюсами статора.
Таким образом, синхронные двигатели могут работать либо с синхронной скоростью, либо они останавливаются.
Вентильно-индукторный двигатель
Можно сказать, что все вентильные электромоторы являются индукторными. В той или иной степени принцип индукции закладывается в синхронный и асинхронный агрегаты. Но есть также модели, в которых индукция способствует самонамагничиванию. Иначе эту машину можно назвать самовозбуждающейся. В традиционном исполнении вентильно-индукторный двигатель этого типа имеет простую конструкцию, питается от однополярных импульсов тока и работает с теми же датчиками ротора. Однако из-за нюансов энергоснабжения его нельзя подключать напрямую к сети. В итоге требуется введение в инфраструктуру специальных преобразователей.
С другой стороны, в данной конструкции присутствуют практически все достоинства синхронных агрегатов. Самым явным из них является широкий спектр частот вращения. Например, вентильно-реактивный двигатель с возможностью самовозбуждения способен выдавать порядка 100 тыс. оборотов. Это уже быстроходные электродвигатели, для которых используются комплектующие высокой степени прочности.
Фазовые колебания
Раскачка фазы синхронного двигателя вызваны:
- Различными нагрузками
- Пульсирующими частотами питания.
Когда синхронный двигатель нагружен (например, компрессоры, насосы и т.д.). Когда нагрузка увеличивается, его ротор возвращается назад на угол соединения «β». При дальнейшем увеличении нагрузки этот угол «β» дополнительно увеличивается, чтобы справиться с возросшей нагрузкой. В этой ситуации, если нагрузка внезапно уменьшается, ротор перегружается, а затем оттягивается, чтобы приспособить новую нагрузку к двигателю. Таким образом, ротор начинает колебаться, как маятник, в своем новом положении, соответствующем его новой нагрузке, пытаясь восстановить равновесие. Если период времени этих колебаний совпадает с собственной частотой станка, то устанавливается резонанс, что может вывести машину из синхронизма. Для демпфирования таких колебаний используются «демпфирующие решетки», известные как «обмотки короткозамкнутых клеток».
Разновидности синхронных машин[ | ]
Однофазные индикаторные сельсины электровоза ВЛ80 Гидрогенератор — явнополюсный синхронный генератор, предназначенный для выработки электрической энергии в работе от гидравлической турбины (при низких скоростях вращения, 50 — 600 мин–1).
Турбогенератор — неявнополюсный синхронный генератор, предназначенный для выработки электрической энергии в работе от паровой или газовой турбины при высоких скоростях вращения ротора — 6000 (редко), 3000, 1500 об/мин.
Синхронный компенсатор — синхронный двигатель, предназначенный для выработки реактивной мощности, работающий без нагрузки на валу (в режиме холостого хода); при этом по обмотке якоря проходит практически только реактивный ток. Синхронный компенсатор может работать в режиме улучшения коэффициента мощности или в режиме стабилизации напряжения. Дает индуктивную нагрузку.
Машина двойного питания (в частности АСМ) — синхронная машина с питанием обмоток ротора и статора токами разной частоты, за счёт чего создаются несинхронные режимы работы.
Ударный генератор — синхронный генератор (как правило, трёхфазного тока), предназначенный для кратковременной работы в режиме короткого замыкания (КЗ).
Сельсин — маломощная синхронная машина, используемая как датчик угла поворота либо в паре с другим сельсином для передачи угла поворота без прямой механической связи.
Также существуют безредукторные, шаговые, индукторные, гистерезисные, бесконтактные синхронные двигатели.
Бесконтактная синхронная машина
Бесконтактный синхронный генератор ГТ40ПЧ6 (поз. 9) на авиадвигателе НК-8 В классической синхронной машине имеется слабое место — контактные кольца со щётками, изнашивающиеся быстрее других частей машины из-за электроэрозии и простого механического износа. Кроме того, искрение щёток может стать причиной взрыва. Поэтому сначала в авиации, а позже и в других областях (в частности, на автономных дизель-генераторах) получили распространение бесконтактные трёхмашинные синхронные генераторы. В корпусе такого агрегата размещены три машины — подвозбудитель, возбудитель и генератор, их роторы вращаются на общем валу. Подвозбудитель — синхронный генератор с возбуждением от вращающихся на роторе постоянных магнитов, его напряжение подаётся в блок управления генератором, где выпрямляется, регулируется и подаётся в обмотку статора возбудителя. Поле статора наводит в обмотке возбудителя ток, выпрямляемый размещённым на валу блоком вращающихся выпрямителей (БВВ) и идущий в обмотку возбуждения генератора. Генератор уже вырабатывает ток, идущий к потребителям.
Такая схема обеспечивает как отсутствие иных механических частей в двигателе, кроме подшипников, так и автономность работы генератора — всё время, пока генератор вращается, подвозбудитель даёт напряжение, которое может быть использовано для питания цепей управления генератором.
Недостатки
синхронных двигателей: 1. Сложность конструкции.
2. Сравнительная сложность пуска в ход.
3. Трудности с регулированием частоты вращения, которое возможно только путем изменения частоты питающего напряжения.
Указанные недостатки синхронных двигателей делают их менее выгодными, чем асинхронные двигатели, при ограниченных мощностях до 100кВт.
Синхронные двигатели: устройство и принцип действия
Основные части синхронного двигателя – это якорь (статор, неподвижная часть) и индуктор (ротор), разделенные воздушной прослойкой. В пазы статора закладывают трехфазную распределенную обмотку – обычно она соединяется «звездой».
Рис. 2 Схема синхронного двигателя
С началом работы двигателя тока, подаваемые в якорь, создают вращение магнитного поля, которое пересекает поле индуктора, что в результате взаимодействия двух полей переходит в энергию. Поле якоря чаще называют иначе – поле реакции якоря. В генераторах такое получают при помощи индуктора. Входящие в состав индуктора электромагниты постоянного тока принято называть полюсами. При этом индукторы во всех синхронных двигателях могут исполняться по двум схемам – явнополюсной и неявнополюсной, различающиеся между собой расположением полюсов. Чтобы уменьшить значение магнитного сопротивления и тем самым улучшить условия для прохождения магнитного потока, применяют ферромагнитные сердечники. Они располагаются в статоре и роторе, для их изготовления используют специальную марку стали – электротехническую, отличающую высоким содержанием кремния – это позволяет уменьшить вихревые токи и повысить электрическое сопротивление стали.
Рис. 3. Магнитные поля в синхронном двигателе
В основу работы синхронного двигателя положен принцип взаимного влияния полюсов индуктора и магнитного поля, индуцируемого якорем. При запуске осуществляется разгон двигателя до частоты, которая близка по своему значению частоте, с которой происходит в зазоре вращение магнитного поля. Только при выполнении этого условия двигатель переходит в функционирование в синхронном режиме. В данный момент пересекаются магнитные поля, инициируемые индуктором и ротором. Этот момент в технической литературе принято называть входом в синхронизацию.
Работа синхронного двигателя наглядно представлена на видео:
Длительное время в качестве разгонного двигателя использовался стандартный синхронный двигатель, который был механически соединен с синхронным. Благодаря этому, ротор на синхронном двигателе механически разгонялся до подсинхронной скорости, а затем уже самостоятельно, за счет взаимодействия электромагнитных полей, втягивался в синхронизм. Обычно при подборе мощности пускового двигателя исходили из соотношения 10-15% от номинальной мощности разгоняемого двигателя. Такого запаса мощности вполне хватало запустить синхронный двигатель не только в холостую, но даже и при незначительной нагрузке на валу.
Рис. 4 Синхронный двигатель (1) с внешним разгонным (2) двигателем
Такой способ разгона усложняет и существенно удорожает общую стоимость, поэтому в современных двигателях от него отказались в пользу разгона в состоянии асинхронного режима. В этом случае с помощью реостата (короткозамкнутым путем) обмотки индуктора замыкают, как в асинхронном двигателе. Чтобы провести запуск двигателя в таком режиме, на ротор устанавливают короткозамкнутую обмотку, выступающую одновременно и как успокоительная обмотка, устраняющая во время проведения синхронизации раскачивание ротора. В момент, когда скорость вращения достигнет требуемого номинального значения, в индуктор будет подан постоянный ток. Но для двигателей, в которых стоят постоянные магниты, все равно придется для разгона использовать внешние двигатели.
В криогенных синхронных машинах используется так называемая обращенная конструкция, при которой размещение индуктора и якоря выполнено наоборот, т.е. индуктор расположен на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения состоят из материалов, обладающими свойствами сверхпроводимости.
Заключение

Концепция использования электроники в составе традиционных роторных двигателей не всегда оправдывается в процессе эксплуатации. Связано это со сферами применения такого оснащения. Чаще всего это традиционные области производства, где совсем не обязательно подключение электронных систем управления. Инновационная начинка заставляет пересматривать производственные циклы, точечно модернизируя технологические процессы. К тому же стоимость двигателя, которая варьируется от 15 до 20 тыс. руб., не добавляет привлекательности этой продукции. Обычные аналоги на контроллерах с электромеханическими реле обходятся дешевле, не говоря о том, что их легче интегрировать в процессе сборки продукции.
И все же появляются направления, в которых высоко ценится именно полупроводниковое управление с датчиками роторов. Как правило, это высокотехнологичное оборудование, выпуском которого занимаются крупные компании. Причем на выходе они предоставляют продукцию разного уровня, в том числе и для бытового применения.