Конструкционные отличия синхронного и асинхронного двигателя
Содержание:
Конструкция электрических машин синхронного типа с постоянными магнитами

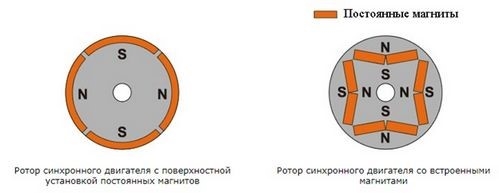
СДПМ состоит из подвижной (ротора) и неподвижной (статора) части. Исполнение ротора различается:
- По установке магнитов. Они могут размещаться на поверхности (SPMSM ) и внутри (IPMSM) вращающегося узла. Роторы со встроенными магнитами применяются в двигателях, работающих при значительной нагрузке на валу и высоких скоростях. Стоимость таких роторов существенно выше.
- По конструкции (явнополюсные и неявнополюсные роторы). Последние имеют равную индуктивность по осям горизонтальной плоскости. Роторы с явновыраженными полюсами имеют разное отношение индуктивности.
Постоянные магниты изготавливают из ферритов, сплавов редкоземельных металлов и других материалов с высокой коэрцитивной силой.
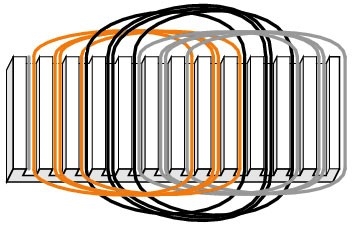
Статор синхронных электрических машин состоит из сердечника, набранного из листов электротехнической стали, и двух- или трехфазной обмотки. Различают статоры с распределенной и сосредоточенной обмоткой. Первая имеет различное положения витков в магнитном поле. Витки в сосредоточенных обмотках имеют одинаковое положение.
Сосредоточенная обмотка:

Распределенная обмотка:
7.3.1. Усройство и принцип действия синхронного электродвигателя.
Характерный признак синхронного
двигателя – вращение ротора с
синхронной частотой n1
=
ƒ160
/pнезависимо от нагрузки на валу. Поэтому
синхронные двигатели используют в
системах автоматики для привода
механизмов, требующих строго стабильной
частоты вращения.
Синхронный двигатель, как и асинхронный,
состоит из неподвижного статора и
вращающегося ротора, разделенных
воздушным зазором (у синхронных двигателей
этот зазор несколько больше). Существуют
конструктивные разновидности исполнения
синхронных двигателей малой мощности,
отличающиеся в основном устройством
ротора: явнополюсные с электромагнитным
возбуждением, явнополюсные с возбуждением
постоянными магнитами, явнополюсные
реактивные (с невозбужден-ным ротором),
неявнополюсные гистерезисные.
Рассмотрим синхронные явнополюсные
двигатели с
электромагнитным возбуждением.
Эти двигатели изготавливаются обычно
мощностью в несколько киловатт и более
и поэтому в устройствах автоматики
широкого применения не получили.
Однако основные положения теории этих
двигателей используются при изучении
синхронных двигателей малой мощности
с возбуждением постоянными магнитами
и других типов.
Для изучения принципа действия синхронного
явнополюсного двигателя с электромагнитным
возбуждением используем модель,
представляющую собой две разделенные
воздушным зазором магнитные системы
с явно выраженными полюсами – внешнюю
1и внутреннюю
2(рис.
6). Если внешняя система полюсов неподвижна,
то благодаря силам магнитного притяжения
внутренняя система полюсов (ротор)
расположится так, что ее полюсы будут
находиться под полюсами внешней системы
противоположной полярности. При этом
силы
FMмагнитного притяжения, действу-ющие
на внутреннюю систему, не будут
создавать электромагнитного момента
(рис. 7,а), так как они направлены
радиально (по оси полюсов).
Если внешнюю систему полюсов вращать
с небольшой частотой n1, то в
начальный момент времени эта система
сместится относительно внутренней
на некоторый угол θ (рис. 7,б). При
этом вектор силы магнитного притяженияFMтакже повернется относительно оси
полюса ротора. Теперь эта сила состоит
из двух составляющих:FM=
Fn
+ Ft
причем нормальная составляющая
Fnнаправлена по оси полюса рото-
— 4 —
ра,
а тангенциальная
Ft–
перпендикулярно оси полюса. Совокупность
составляющих
Ftдействующих
на все полюсы ротора, создает на роторе
электромагнитный вращающий моментМ,
приводящий ротор во вращение с
синхронной частотойn1, т. е.
синхронно вращению внешней системе
полюсов.
Рис.
6. Упрощенная модель синхронного
двигателя:
Рис. 7. Возникновение
электромагнитного
а
– внешняя магнитная система;
момента на роторе синхронного
б
– внутренняя магнитная система.
двигателя.
Трехфазный синхронный двигатель
отличается от рассмотренной модели
тем, что в нем вместо внешней системы
полюсов имеется неявнополюсный
статор с распределенной трехфазной
обмоткой, аналогичный статору
асинхронного трехфазного двигателя.
Ротор синхронного двигателя – явнополюсной
конструкции с электромагнитным
возбуждением. При этом на полюсах ротора
2 располагают
полюсные
катушки
3(рис. 8), которые при последовательном
соединении образуют обмотку возбуждения
(ОВ).
При подключении ОВ к источнику постоянного
тока возникает магнитный поток возбуждения
ФВ, силовые линии которого
сцеплены с обмоткой статора1.
При включении обмотки статора в
трехфазную сеть создается вращающееся
с синхронной частотойn1магнитное поле с таким же числом
полюсов, как на роторе. Благодаря
взаимодействию полей статора и ротора
возникает электромагнитный момент,
вращающий ротор ссин-хронной
частотой. В результате электрическая
энергия сети преобразуется в механическую
энергию вращения.
Предположим, что ротор двигателя враща-
Рис.
8.
Магнитная система явнополюсногоется с частотой, отличающейся
от частоты
синхронного
двигателя (2р
= 4): вращения
поля статора, тогда в некоторые
1
– обмотка статора; 2
– полюса ротора; моменты
времени возбужденные полюса ро-
3
– полюсные катушки. тора
окажутся под одноименными полюсами
поля статора, возникнут силы магнитного
от-
— 5 —
талкивания
Суммарный электромагнитный момент
станет равным нулю и ротор остановится.
На рис. 9,
апоказана конструкция ротора синхронного
двигателя с явно выраженными полюсами.
Возбуждение синхронной машины
Для питания обмотки возбуждения предусмотрено наличие возбудителя, в его качестве выступает генератор постоянного тока, якорь которого сопряжен с валом машины, посредством использования механического устройства.
По способу возбуждения синхронные машины подразделяются на два типа:
- Возбуждение независимого вида.
- Самовозбуждение.
При независимом возбуждении схема подразумевает наличие подвозбудителя, который питает: обмотку главного возбудителя, реостат для регулировки, устройства управления, регуляторы напряжения и т. д. Кроме этого способа, возбуждение может осуществляться от генератора, выполняющего вспомогательную функцию, он приводится в работу от двигателя синхронного или асинхронного типа.
Для самовозбуждения, питание обмотки происходит через выпрямитель, работающий на полупроводниках или ионного типа.
Для турбо- и гидрогенераторов используют тиристорные устройства возбуждения. Ток возбуждения регулируется в автоматическом режиме при помощи регулятора возбуждения. Для синхронных машин малой мощности характерно использование регулировочных реостатов, они включены в цепь обмотки возбуждения.
Пуск синхронного двигателя
Одним
из главных недостатков синхронных
двигателей является сложность их пуска
в ход. Пуск синхронных двигателей может
быть осуществлен при помощи вспомогательного
пускового двигателя или путем асинхронного
пуска.
Пуск
синхронного двигателя при помощи
вспомогательного двигателя. Если ротор
синхронного двигателя с возбужденными
полюсами развернуть другим, вспомогательным
двигателем до скорости вращения поля
статора, то магнитные полюсы статора,
взаимодействуя с полюсами ротора,
заставят ротор вращаться далее
самостоятельно без посторонней помощи,
в такт с полем статора, т. е. синхронно
(откуда эти двигатели и получили свое
название).
Д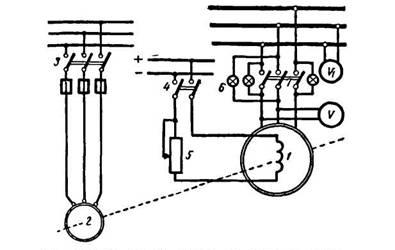 ля
ля
осуществления пуска необходимо, чтобы
число пар полюсов асинхронного двигателя
было меньше числа пар полюсов синхронного
двигателя, ибо при этих условиях
вспомогательный асинхронный двигатель
может развернуть ротор синхронного
двигателя до синхронной скорости.
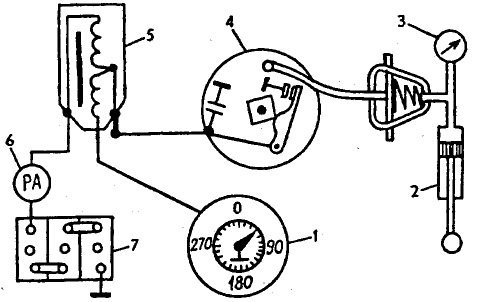
Порядок
пуска синхронного двигателя следующий.
Включая рубильник 3, пускают вспомогательный
асинхронный двигатель 2, который
разворачивает ротор синхронного
двигателя 1 до скорости, соответствующей
скорости поля статора. Скорость вращения
вспомогательного двигателя определяется
по тахометру1. Затем, включая рубильник
4 постоянного тока, возбуждают полюсы
ротора. Чтобы включить синхронный
двигатель в сеть трехфазного тока, его
нужно синхронизировать так же, как и
при включении синхронного генератора
на параллельную работу. Для этого
реостатом 5 устанавливают такое
возбуждение, чтобы напряжение обмотки
статора по вольтметру V было равно
напряжению сети, указываемому вольтметром
V1.
Электролампы
6, включенные параллельно ножам рубильника
7 трех-фазной сети, при разомкнутом
рубильнике будут мигать. Сначала мигание
будет частым, но если изменять скорость
вращения вспомогательного асинхронного
двигателя, то лампы будут мигать . все
реже и реже. Синхронный двигатель можно
включить в сеть трехфазного тока
рубильником 7 тогда, когда все три лампы
одновременно погаснут. Ротор двигателя
при этом входит в синхронизм и может
далее вращаться самостоятельно. Теперь
вспомогательный двигатель 2 рубильником
3 можно отключить от сети.
Сложность
пуска и необходимость вспомогательного
двигателя являются существенными
недостатками этого способа пуска
синхронных двигателей. Поэтому в
настоящее время он применяется редко.
Асинхронный
пуск синхронного двигателя. Для
осуществления этого способа пуска в
полюсных наконечниках полюсов ротора
укладывается дополнительная
короткозамкнутая обмотка. Так как во
время пуска в обмотке возбуждения 1
двигателя наводится большая э. д. с, то
по соображениям безопасности она
замыкается рубильником 2 на сопротивление
3
При
включении напряжения трехфазной сети
в обмотку статора 4 синхронного двигателя
возникает вращающееся магнитное поле,
которое, пересекая короткозамкнутую
(пусковую) обмотку, заложенную в полюсных
наконечниках ротора, индуктирует в ней
токи.
Эти
токи, взаимодействуя с вращающимся
полем статора, приведут ротор во вращение.
При достижении ротором наибольшего
числа оборотов (95—97% синхронной скорости)
рубильник 2 переключают так, чтобы
обмотку ротора включить в сеть постоянного
напряжения.
Недостатком
асинхронного пуска является большой
пусковой ток (в 5—7 раз больший рабочего
тока). Пусковой ток вызывает падение
напряжения в сети, а это отражается на
работе других потребителей. Для уменьшения
пускового тока применяют пуск при
пониженном напряжении с помощью реактора
2 или автотрансформатора.
В
настоящее время применяют почти
исключительно асинхронный пуск синхронных
двигателей ввиду его простоты и
надежности. Существуют также схемы
автоматического асинхронного пуска
синхронных двигателей
Разновидности движков
Конструкция ротора и принцип действия синхронной машины-двигателя напрямую связана
- с мощностью, которую надо создать на его вале,
- необходимой для этого величиной магнитного потока,
- параметрами напряжения питания статора.
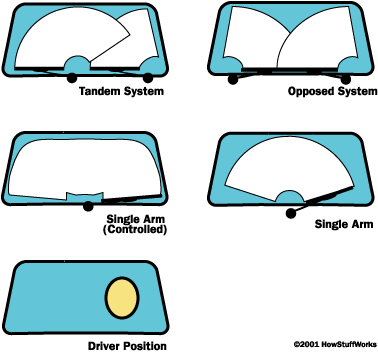
Устройство синхронных машин небольшой мощности получается более простым при изготовлении магнитного ротора из специальных материалов. Так же применяется явно полюсный ротор с малой начальной намагниченностью. В результате получаются конструкции с постоянными магнитами, а также гистерезисные и синхронные реактивные двигатели. На статор этих движков подается переменное напряжение. Число фаз и частота соответствуют конструкции двигателя. В однофазных движках может быть использован конденсатор, через который подключается одна из двух обмоток статора. Но может быть применена схема из показанных далее вариантов.
Три разновидности конструкции ротора реактивного двигателя
Гистерезисный движок похож на синхронный реактивный двигатель. Эти синхронные машины переменного тока характеризует одинаковый принцип действия. Его определяет магнитное поле статора, намагничивающее ротор. Гистерезисный движок и синхронный реактивный электродвигатель своей надежностью не уступают асинхронным двигателям. Однако роторы этих синхронных машин всегда бывают существенно дороже роторов асинхронных движков.
С целью получения максимального силового взаимодействия и больших по величине крутящих моментов в роторе используется принцип электромагнита. При этом его называют индуктором с обмоткой возбуждения. Для ее питания применяется постоянное напряжение, которое подается на щетки. Они расположены на статоре и скользят по кольцам, установленным на роторе. Через эту пару скользящих контактов течет постоянный ток возбуждения.
Классический движок с индуктором
Такое классическое устройство синхронной машины существует и в наши дни, но преимущественно в наиболее мощных моделях. Для запуска движков обычно используются конструктивные решения со скольжением магнитных полей, характерные для асинхронных двигателей. При наличии индуктора для этого достаточно накоротко замкнуть щетки. В синхронных электрических машинах движки без щеток в роторе делаются с пусковыми обмотками типа беличьей клетки. Могут быть иные конструктивные решения для асинхронного старта.
Важной особенностью рассматриваемых двигателей, питаемых переменным напряжением, является их польза при работе без механической нагрузки или при ее небольшой величине. В таком режиме работы при небольшом возбуждении реактивная мощность из сети потребляется, а при значительном — отдается в сеть. Тем самым увеличивается эффективность электроснабжения
Для этой цели делаются специальные движки, называемые синхронными компенсаторами
Тем самым увеличивается эффективность электроснабжения. Для этой цели делаются специальные движки, называемые синхронными компенсаторами.
Движки-компенсаторы на подстанции
Развитие полупроводниковых приборов позволило создавать вращающееся магнитное поле путем преобразования постоянного напряжения. Очевидно то, что такое техническое решение расширило возможности управления электрическими двигателями. Регулирование частоты питающего напряжения и бесконтактный индуктор — это главные достижения полупроводниковых моделей. Но при этом существуют ограничения, определяемые возможностями электронных ключей.
По этой причине наиболее мощные из всех существующих движков по-прежнему являются трехфазными индукторными конструкциями со щетками и кольцами.
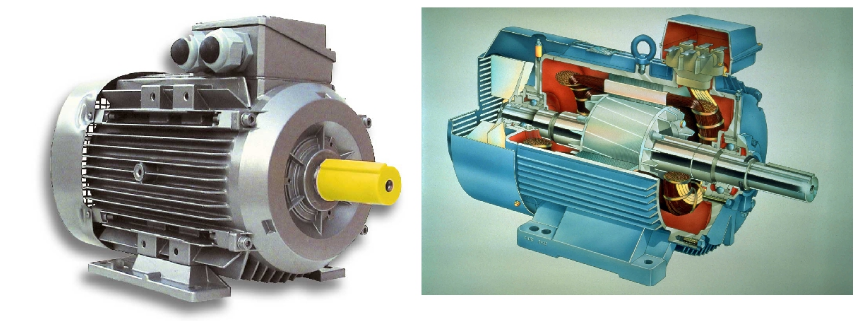
Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
Отличительные черты асинхронных двигателей
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
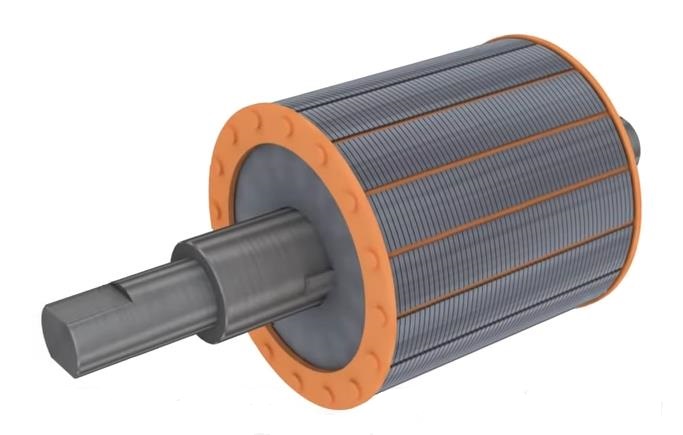
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
https://youtube.com/watch?v=hU9krurbi0c
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Синхронные двигатели: устройство и принцип действия
Основные части синхронного двигателя – это якорь (статор, неподвижная часть) и индуктор (ротор), разделенные воздушной прослойкой. В пазы статора закладывают трехфазную распределенную обмотку – обычно она соединяется «звездой».
Рис. 2 Схема синхронного двигателя
С началом работы двигателя тока, подаваемые в якорь, создают вращение магнитного поля, которое пересекает поле индуктора, что в результате взаимодействия двух полей переходит в энергию. Поле якоря чаще называют иначе – поле реакции якоря. В генераторах такое получают при помощи индуктора. Входящие в состав индуктора электромагниты постоянного тока принято называть полюсами. При этом индукторы во всех синхронных двигателях могут исполняться по двум схемам – явнополюсной и неявнополюсной, различающиеся между собой расположением полюсов. Чтобы уменьшить значение магнитного сопротивления и тем самым улучшить условия для прохождения магнитного потока, применяют ферромагнитные сердечники. Они располагаются в статоре и роторе, для их изготовления используют специальную марку стали – электротехническую, отличающую высоким содержанием кремния – это позволяет уменьшить вихревые токи и повысить электрическое сопротивление стали.
Рис. 3. Магнитные поля в синхронном двигателе
В основу работы синхронного двигателя положен принцип взаимного влияния полюсов индуктора и магнитного поля, индуцируемого якорем. При запуске осуществляется разгон двигателя до частоты, которая близка по своему значению частоте, с которой происходит в зазоре вращение магнитного поля. Только при выполнении этого условия двигатель переходит в функционирование в синхронном режиме. В данный момент пересекаются магнитные поля, инициируемые индуктором и ротором. Этот момент в технической литературе принято называть входом в синхронизацию.
Работа синхронного двигателя наглядно представлена на видео:
Длительное время в качестве разгонного двигателя использовался стандартный синхронный двигатель, который был механически соединен с синхронным. Благодаря этому, ротор на синхронном двигателе механически разгонялся до подсинхронной скорости, а затем уже самостоятельно, за счет взаимодействия электромагнитных полей, втягивался в синхронизм. Обычно при подборе мощности пускового двигателя исходили из соотношения 10-15% от номинальной мощности разгоняемого двигателя. Такого запаса мощности вполне хватало запустить синхронный двигатель не только в холостую, но даже и при незначительной нагрузке на валу.
Рис. 4 Синхронный двигатель (1) с внешним разгонным (2) двигателем
Такой способ разгона усложняет и существенно удорожает общую стоимость, поэтому в современных двигателях от него отказались в пользу разгона в состоянии асинхронного режима. В этом случае с помощью реостата (короткозамкнутым путем) обмотки индуктора замыкают, как в асинхронном двигателе. Чтобы провести запуск двигателя в таком режиме, на ротор устанавливают короткозамкнутую обмотку, выступающую одновременно и как успокоительная обмотка, устраняющая во время проведения синхронизации раскачивание ротора. В момент, когда скорость вращения достигнет требуемого номинального значения, в индуктор будет подан постоянный ток. Но для двигателей, в которых стоят постоянные магниты, все равно придется для разгона использовать внешние двигатели.
В криогенных синхронных машинах используется так называемая обращенная конструкция, при которой размещение индуктора и якоря выполнено наоборот, т.е. индуктор расположен на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения состоят из материалов, обладающими свойствами сверхпроводимости.
Особенности синхронного реактивного электродвигателя
Преимущества:
Простая и надежная конструкция ротора:ротор имеет простую конструкцию, состоящую из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки.
Низкий нагрев:так как в роторе отсутствуют токи, он не нагревается во время работы, увеличивая срок службы электродвигателя.
Нет магнитов:снижается конечная цена электродвигателя, так как при производстве не используются редко земельные металлы. При отсутствии магнитных сил упрощается содержание и техническое обслуживание электродвигателя.
Низкий момент инерции ротора:так как на роторе отсутствует обмотка и магниты, ниже, что позволяет электродвигателю быстрее набирать обороты и экономить электроэнергию.
Возможность регулирования скорости: в виду того, что синхронный реактивный электродвигатель для своей работы требует частотный преобразователь, имеется возможность управления скоростью вращения реактивного двигателя в широком диапазоне скоростей.
Недостатки:
Частотное управление:для работы требуется частотный преобразователь.
Низкий коэффициент мощности:из-за того, что магнитный поток создается только за счет реактивного тока. Решается за счет использования частотного преобразователя с коррекцией мощности.
Вентильно-индукторный двигатель

Можно сказать, что все вентильные электромоторы являются индукторными. В той или иной степени принцип индукции закладывается в синхронный и асинхронный агрегаты. Но есть также модели, в которых индукция способствует самонамагничиванию. Иначе эту машину можно назвать самовозбуждающейся. В традиционном исполнении вентильно-индукторный двигатель этого типа имеет простую конструкцию, питается от однополярных импульсов тока и работает с теми же датчиками ротора. Однако из-за нюансов энергоснабжения его нельзя подключать напрямую к сети. В итоге требуется введение в инфраструктуру специальных преобразователей.
С другой стороны, в данной конструкции присутствуют практически все достоинства синхронных агрегатов. Самым явным из них является широкий спектр частот вращения. Например, вентильно-реактивный двигатель с возможностью самовозбуждения способен выдавать порядка 100 тыс. оборотов. Это уже быстроходные электродвигатели, для которых используются комплектующие высокой степени прочности.
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – – ), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Электродвигатели переменного тока
Пользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.